
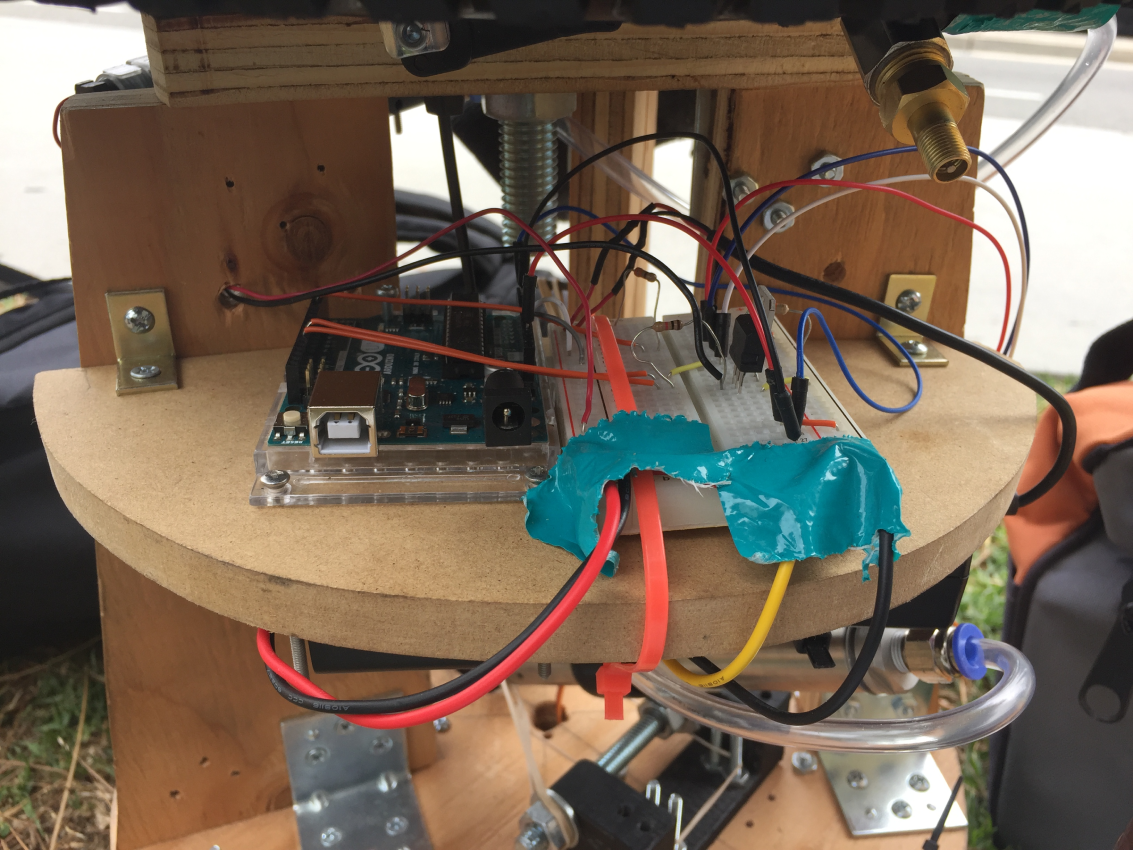

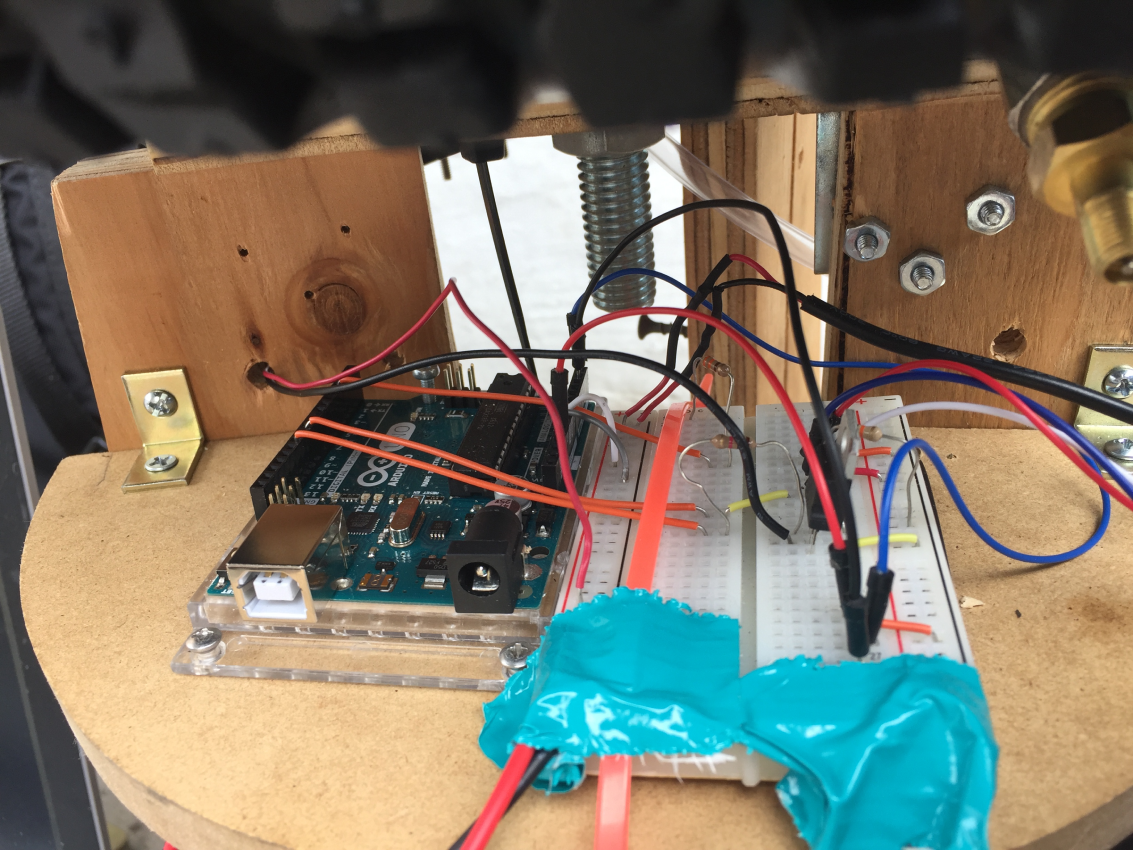
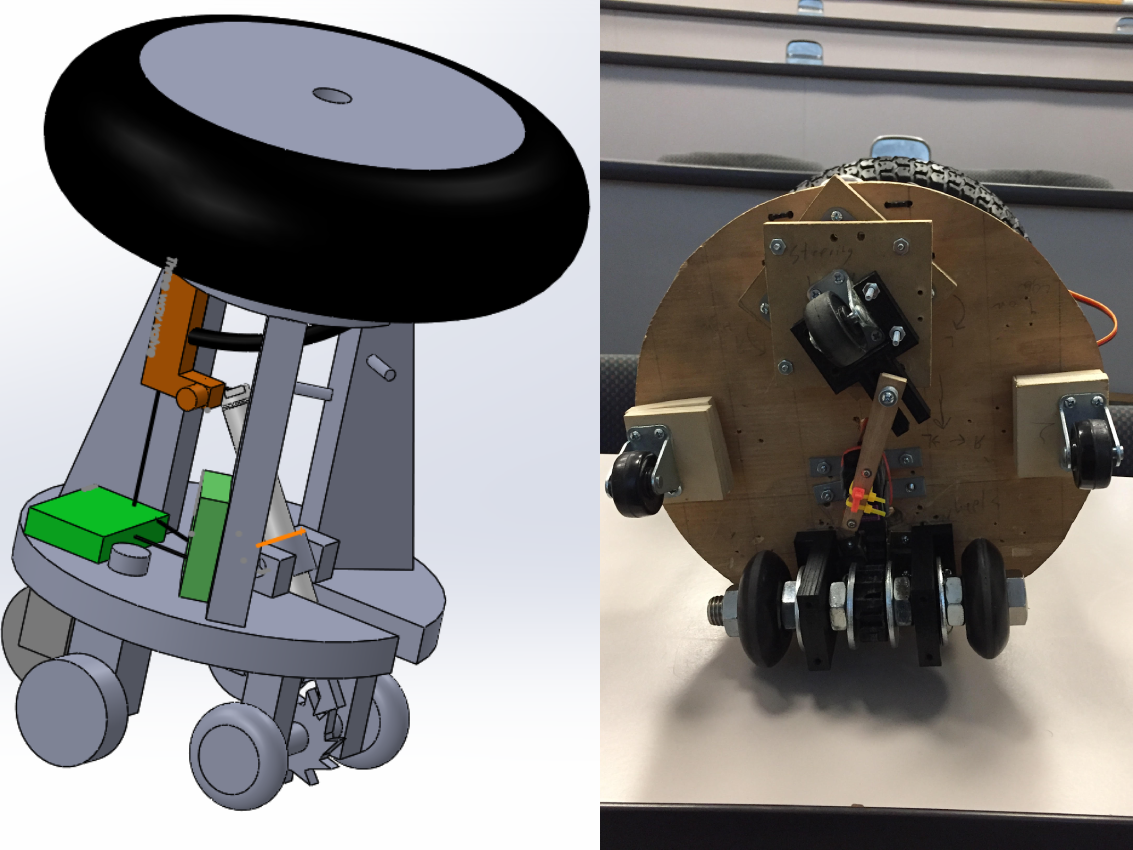
Two other Engineers and I were tasked with creating a pneumatically powered robot that can autonomously navigate a maze without touching the walls. Our primary mechanical design goal was stability so that the robot wouldn’t get knocked over by other robots. The secondary goal was to create an innovative propulsion and steering systems. As an end result the robot was extremely stable and was never knocked over due to two casters acting as “training wheels” that were set wide and slightly above the ground. The propulsion system was able to move the robot forward, but issues with the one way bearing prevented the robot from building up any remarkable momentum, also the steering system was effective, but that was after a design flaw with the positioning of the wheel was corrected.

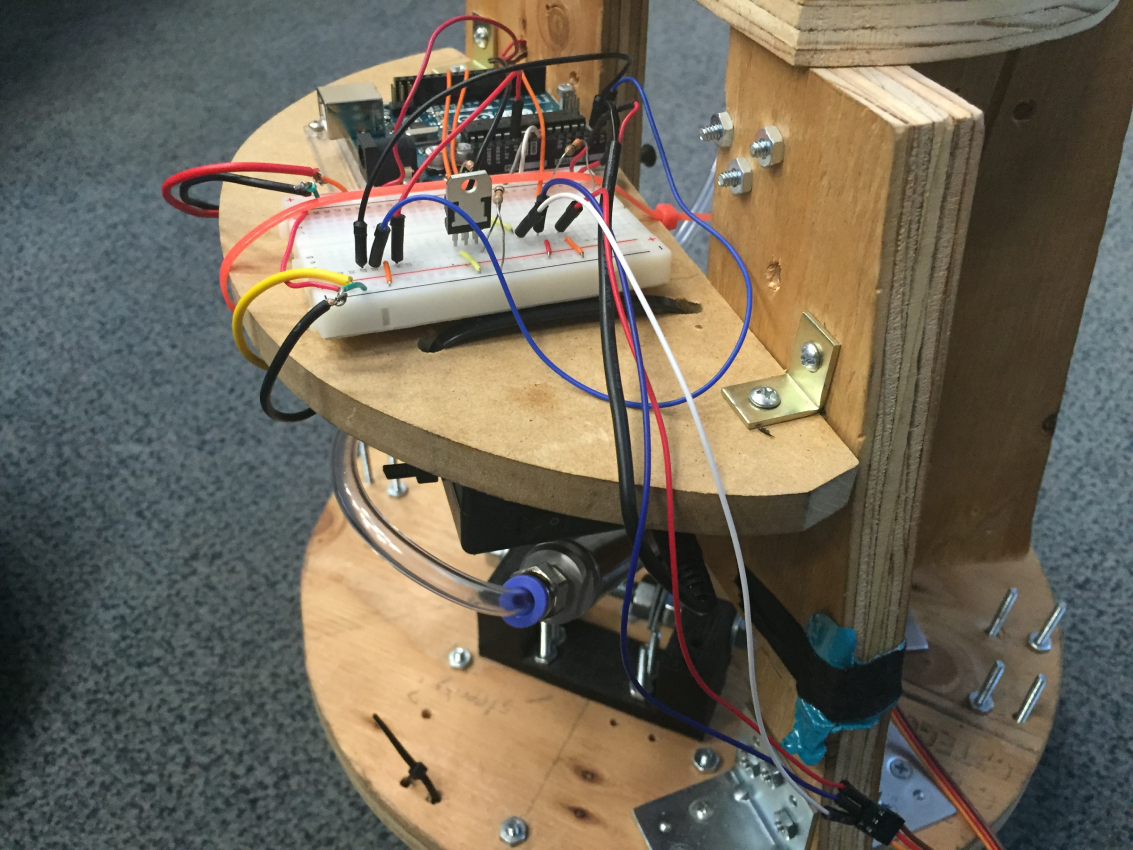
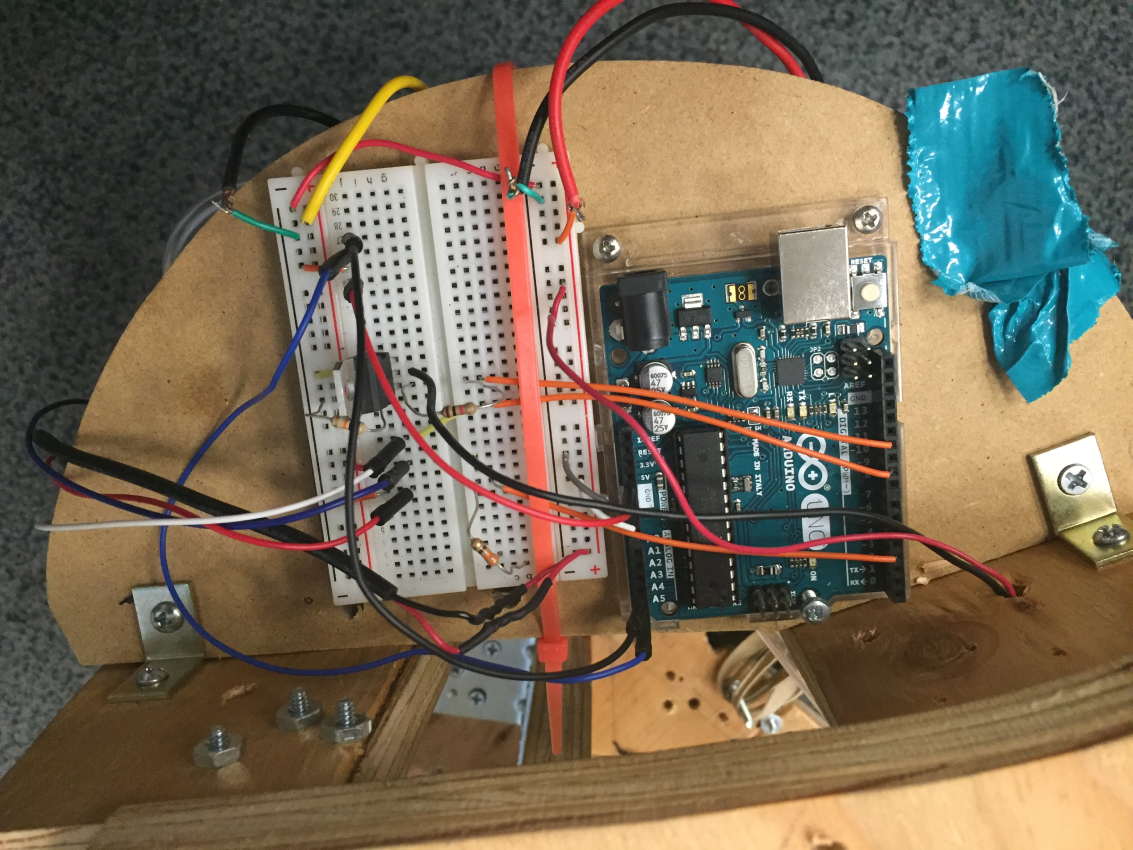
Our software design goals were to create a single program that 1) could manage the duty cycle of the piston 2) use data from a magnetometer to accurately steer. Our final program was organized so that variable values could be changed quickly for efficiency. In comparison to other teams, we were able to easily optimize the duty cycle of our piston by changing the “on” and “off” time of the solenoid valve in order to maximize our velocity. With our magnetometer, the robot was able to autonomously navigate the maze.